
Introduction
The work flow presented here is based on a well known structure from motion (SfM) set of algorithms used to produce a dense three-dimensional point cloud from multi-view imagery. This work flow uses the following software:
siftGPU (http://www.cs.unc.edu/~ccwu/siftgpu/ written by Changchang Wu)
Bundler (http://phototour.cs.washington.edu/bundler/ written by Noah Snavely)
CMVS (http://grail.cs.washington.edu/software/cmvs/ written by Yasutaka Furukawa)
PMVS (http://grail.cs.washington.edu/software/pmvs/ written by Yasutaka Furukawa and Jean Ponce)
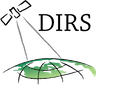
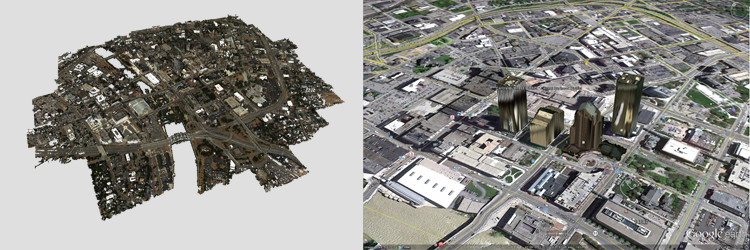
The goal of this work flow is to generate geo-accurate dense point clouds from aerial imagery flown with an IMU/GPS system. By modifying the source of Bundler to handle IMU/GPS information a geo-accurate coordinate system can be generated for use with CMVS/PMVS. The installation page will show users how to download, install, and patch all the algorithms in order to build this work flow. For information about running the work flow, look at the user guide.
