
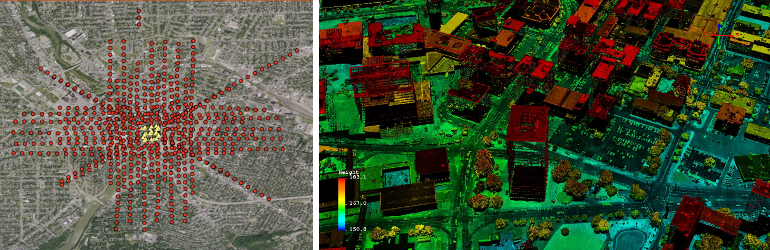
The dataset provided here was collected in order to test a variety of 3D reconstruction algorithms under evaluation and development at Rochester Institute of Technology. One such workflow for Dense Point Cloud Generation from aerial imagery is presented here.
As this workflow was developed, initial results were generated from just a few aerial imagery datasets with limited image density and building geometry diversity.
In order to derive the dense point clouds with high fidelity, a substantially large number of images need to be used over each object preferably from different view angles. The overlap of traditional flightplans may not be adequate for dense 3D reconstruction. Additional image frames may be required by flying a region both in the North/South and East/West directions with increased along-track and side overlap. It should be also noted that 3D reconstruction requires original imagery prior to any ortho-rectification or mosaic process.
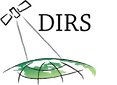
Given this unique nature of required image coverage, RIT developed a WASP flightplan in order to acquire an additional image dataset with extreme overlap. On July 27, 2011 a portion of downtown Rochester, NY (43.155°, -77.606°) was flown at 70%-90% overlap in both N/S, E/W, and diagonally NW/SE and NE/SW cardinal directions. This oversampled dataset will allow RIT to methodically test the algorithm limitations and establish recommendations for future input image datasets. This extreme overlap is not a requirement of 3D extraction workflows but designed such that a user has the option of testing different percent overlaps by dropping entire flightlines or using only every other image frames.
This valuable dataset was further augmented with the simultaneous collection of LiDAR by Kucera International with a Leica ALS60 system.
